第1部 基礎知識
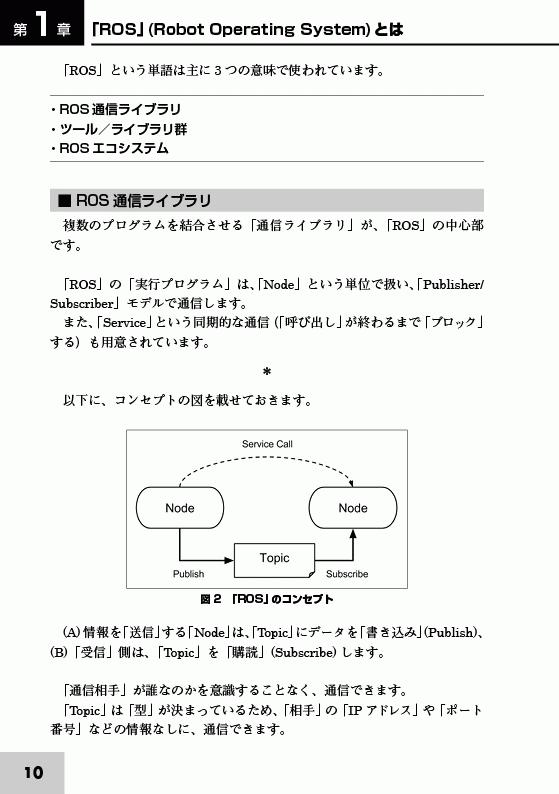
第1章 「ROS」(Robot Operating System)とは
[1-1] 「ROS」でできること
[1-2] 「ROS」とは何か
第2章 「ROS」の勉強の仕方
[2-1] 本書の構成
[2-2] 「ROS」の勉強の仕方
[2-3] 「Twitter」について
第3章 「ROS」のインストール
[3-1] 「ROS」をインストールするOS
[3-2] 「ROS」の「バージョン」について
[3-3] 「ROS」をインストールする
[3-4] 動作確認
第4章 「ROS」の用語を覚える
[4-1] 「ROS」の用語
[4-2] 「ROS」の通信方法
第5章 「ROS」に慣れる
[5-1] 「ROS」の初歩
第6章 「ROS」で「Hello World」
[6-1] 「Hello World」を実行
第2部 基本的なプログラム①
第7章 「ROS」のプログラムを書く
[7-1] 「ワーク・スペース」を作る
[7-2] 「パッケージ」の作成
[7-3] 「Python」で「Publisher」を作る
[7-4] 「Python」で「Subscriber」を作る
[7-5] 「talker.py」と「listener.py」を実行してみる
[7-6] 「roslaunch」で楽をしよう
第8章 「シミュレータ」上の「ロボット」を動かす
[8-1] 「シミュレータ」の「インストール」と実行
[8-2] 「ROS」を使って「ロボット」を動かす
[8-3] 「Subscriber」を使って、「センサ・データ」を読む
[8-4] 「Parameter」を使う
[8-5] 「turtlesim」を同じプログラムで動かす
[8-6] 「PR2」を動かす
第9章 「Service」を理解する
[9-1] 「ServiceServer」を作る
[9-2] 「ServiceClient」を作る
[9-3] 「Seriviceサンプル」の実行
第10章 「独自型」の「Topic/Service」を作る
[10-1] 「rosmsg」を使う
[10-2] 「独自のService型」を作る
[10-3] 「Service」のまとめ
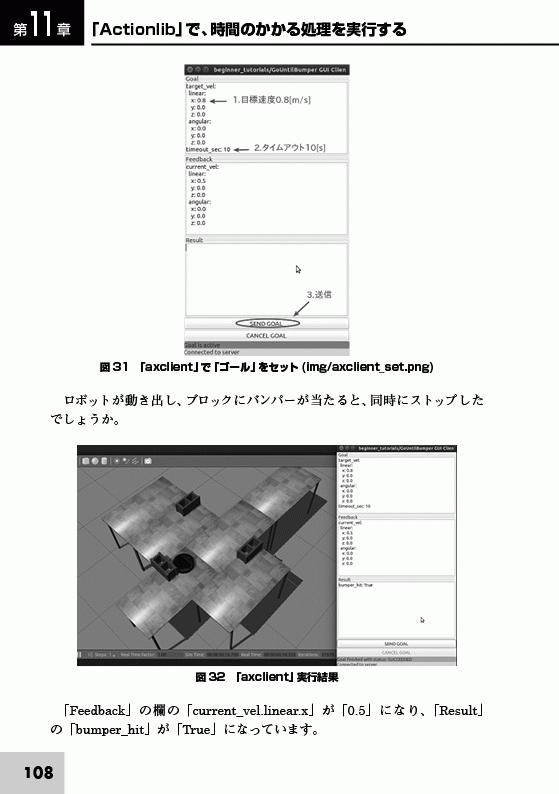
第11章 「Actionlib」で、時間のかかる処理を実行する
[11-1] 「Action Server」の作成
[11-2] 「Action Server」の実行
[11-3] 「Action Client」の作成
[11-4] 「Action Client」の実行
第12章 「Python」の「ライブラリ」を作る
[12-1] 「ライブラリ」を置くための準備
[12-2] 「ライブラリ」を使う
[12-3] 「actionlib」まとめ
第3部 基本的なプログラム②
第13章 「ROS」のGUI
[13-1] rviz
[13-2] rqt
第14章 「ジョイスティック」でロボット操縦
[14-1] Playstation4用のコントローラーを使う
[14-2] 「joy_node」の実行
[14-3] 「ジョイスティック」による操縦プログラム
[14-4] 「操縦プログラム」の実行
第15章 「C++」の「ノード」を作る
[15-1] 「C++」を使おう
[15-2] 「C++」の「コード」を書く
[15-3] 「C++」の「コード」を「コンパイル」する
第4部 応用的なプログラム
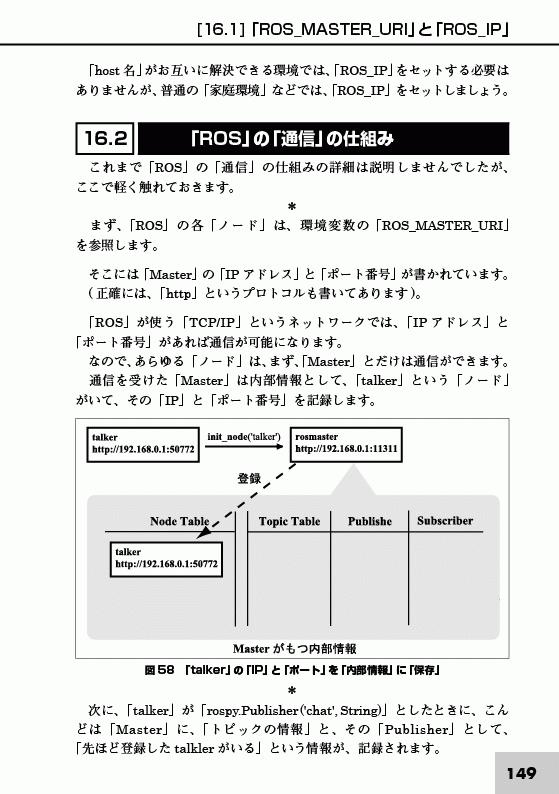
第16章 「分散機能」を使う
[16-1] 「ROS_MASTER_URI」と「ROS_IP」
[16-2] 「ROS」の「通信」の仕組み
第17章 「ROS」を使って「分散画像処理」
[17-1] 「USBカメラ」の準備
[17-2] 「cv_bridge」を使って「OpenCV形式」に変換する
[17-3] 「rosbag」で「Topic」を記録
[17-4] 「rqt_bag」で「bagファイル」を確認
第18章 「tf」を使って「座標変換」
[18-1] 「tf」とは
[18-2] 「PR2」の「シミュレータ」を立ち上げる
[18-3] 「PR2」の「腕」と「頭」を動かす
[18-4] 「tf」を「rviz」で確認する
[18-5] 「tf」で「相対関係」を取得する
[18-6] 「look_hand」を実行
第19章 自分の「ロボット」を「ROS」で動かす
[19-1] 「ROS対応」の「ロボット」を買う
[19-2] 「ROS対応」の「ロボット」を自作する
[19-3] 「rosserial」でマイコンとつなぐ
[19-4] 「サーボ・モータ」を使う
第20章 その他の「基本ライブラリ」
|