|
第1章 「BeagleBone(ビーグルボーン) Black(ブラック)」の概要
[1-1] 「BeagleBone Black」とは
[1-2] 「BeagleBone Black」を使うための準備
[1-3] 「BeagleBone Black」の周辺機器
第2章 「Linux(リナックス)システム」のインストール
[2-1] 「Linux」の概要
[2-2] 「Ubuntu」のインストール:準備
[2-3] 「Ubuntu」のインストール:作業手順
第3章 「Ubuntu(ウブンツ)」を使う
[3-1] 「Ubuntu」操作の基礎
[3-2] 「デスクトップPC」として使う
[3-3] 「Webサーバ」として使う
第4章 「Python(パイソン)」入門
[4-1] 「Python」の概要
[4-2] 「Python」の基本ルール
[4-3] 「Python」でのライブラリ活用
第5章 「Python」による「BeagleBone Black」のハード制御
[5-1] 「Python」ライブラリのインストール
[5-2] 「GPIOポート」の制御
[5-3] 「PWM信号」の制御
[5-4] 「ADC」の利用
[5-5] 「UART」を用いた「シリアル通信」
[5-6] 「I2C」を用いたデバイスとの通信
[5-7] 「SPI」を用いた「デバイス」との通信
第6章 「自動車工作キット」を改造して「ロボット化」する
[6-1] 「自動車工作キット」を改造してみよう
[6-2] 「Python」で動く「走行プログラム」を作ってみよう
[6-3] 「BeagleBone Black」を「無線化」しよう
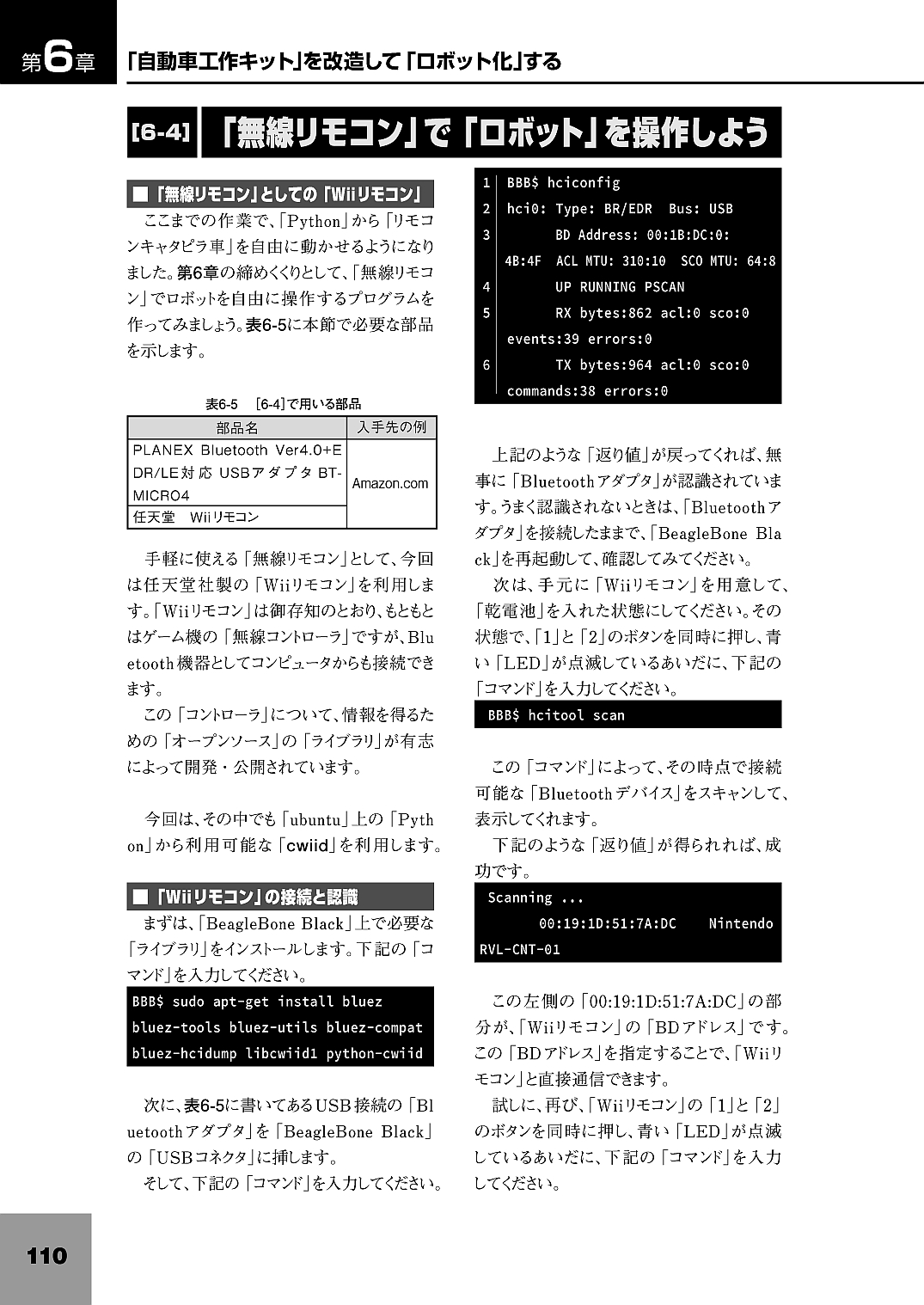
[6-4] 「無線リモコン」で「ロボット」を操作しよう
第7章 壁にぶつからない「ロボット」を作る
[7-1] 「ロボット」に「近接距離センサ」を搭載しよう
[7-2] 「近接距離センサの値」を確認してみよう
[7-3] 「障害物」を避けて走行する「プログラム」を作ろう
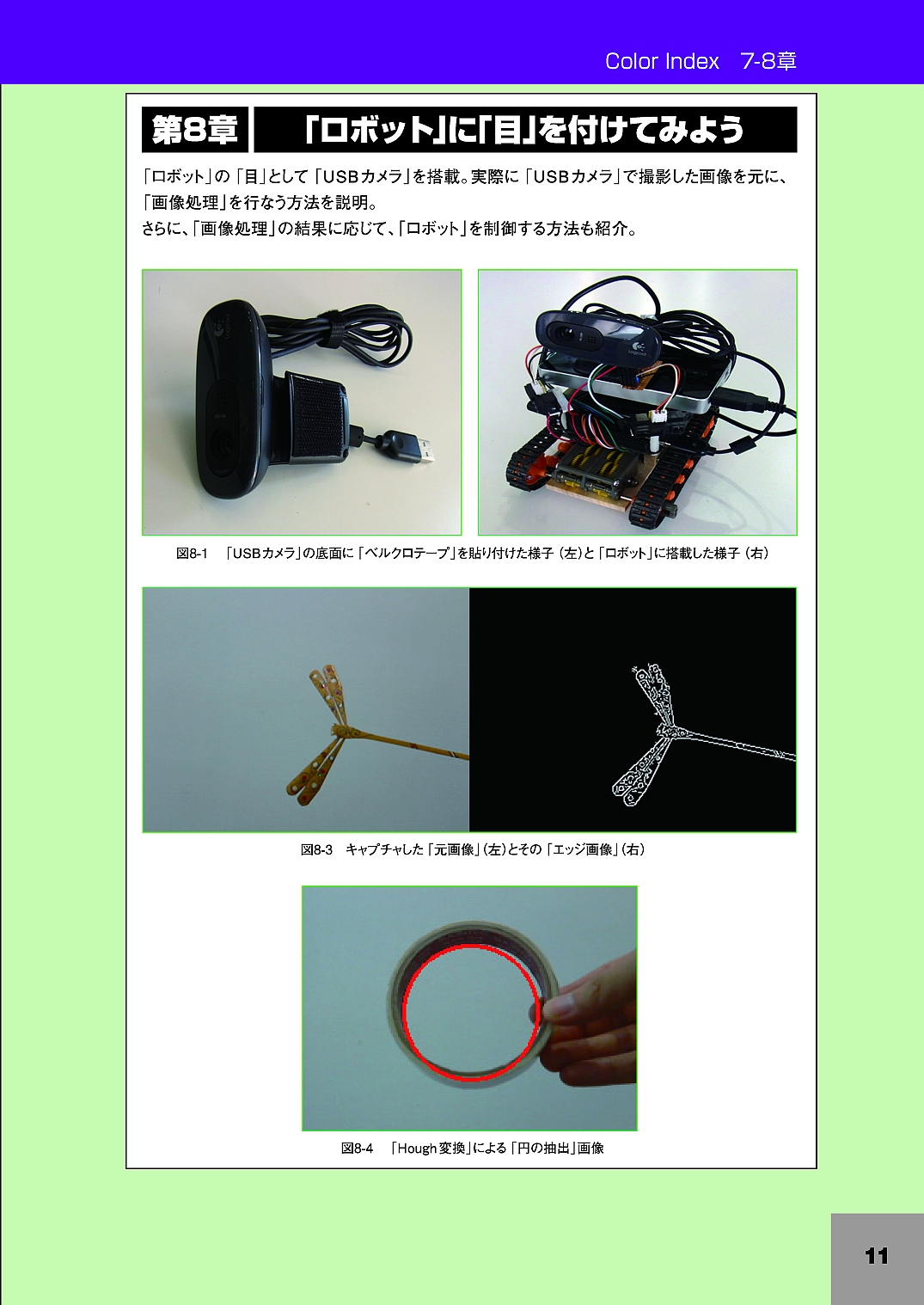
第8章 「ロボット」に「目」を付ける
[8-1] 「USBカメラ」を「ロボット」に搭載しよう
[8-2] 「Python+OpenCV」で「画像処理」をしてみよう
[8-3] 「ロボット」で「赤いボール」を追いかけてみよう
第9章 「ロボット」に簡単な「知能」を付ける
[9-1] 「サブサンプション・アーキテクチャ」の導入
[9-2] 簡単な「並列行動プログラム」を作ってみよう
|