|
センサー・制御・動作――ロボットの基本を理解する
|
ロボットはどうやって世界を知る?センサーでわかる電子工作
超音波センサー・無線通信・重力加速度…
|
|
神田 民太郎 著
2026年 1月27日発売
A5判
144ページ
定価 ¥2,970(本体 ¥2,700)
|
|
ISBN978-4-7775-2326-9 C3055 ¥2700E
|
 |
センサーで感じて、回路で考え、モーターで動かす。
電子工作とロボットのしくみを、実験と作例で体感できる一冊。
|
|
この書籍には、電子版があります。
|
|
| ■ 主な内容 ■ |
|
はじめに 「プログラム」のダウンロード
ロボットはどうやって「感じて・考えて・動く」のか?
- 1-1 この本でやること
- 1-2 ロボットの基本構造はとても単純
ライントレースの仕組み
- 2-1 ライントレースカーの構成
- 2-2 フォトリフレクタは「色」を見ていない
- 2-3 ロボットは「考えている」のではなく「分岐している」
- 2-4 どうやって曲がるのか
- 2-5 ライントレースカーを作ってみよう
音で距離を測る超音波センサー
- 3-1 超音波センサーの仕組み
- 3-2 距離が数値になるまで
- 3-3 実験の構成と動作
- 3-4 計測の落とし穴
- 3-5 ロボットに「距離感」を与える
人の動きを見る人感センサー
- 4-1 人感センサーは「熱の動き」を見ている
- 4-2 人感センサーの中身はどうなっているか
- 4-3 人感センサーを作ってみる
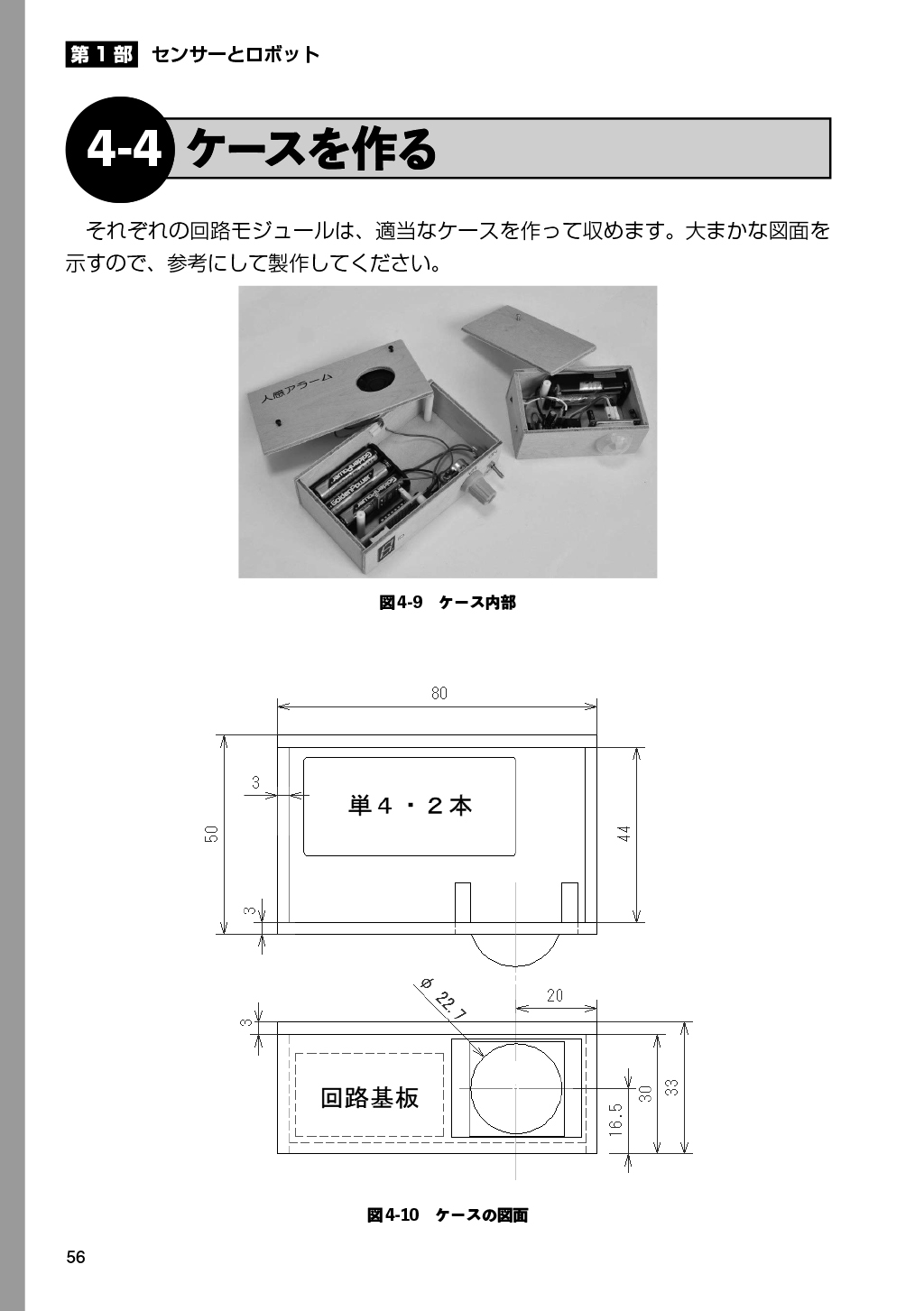
- 4-4 ケースを作る
- 4-5 「熱の変化」だけを見る人感センサー
傾きと動きを感じる加速度センサー
- 5-1 加速度センサーとは何か
- 5-2 三軸加速度センサーを作ってみよう
- 5-3 ケースを作る
- 5-4 使用実験
離れてもつながる双方向無線
- 6-1 双方向無線とは
- 6-2 双方向ワイヤレス呼出機を作る
- 6-3 ケースを作る
昇圧回路とモーター制御
- 7-1 昇圧とは何か
- 7-2 モーターを制御する回路を作る
重力加速度測定機を作る
- 8-1 重力加速度とは
- 8-2 今回製作する重力加速度測定機
- 8-3 回路図とプログラム
- 8-4 落下スタート検知センサーと着地検知センサー
- 8-5 測定してみる
- 8-6 2/100秒の誤差はどこからきているのか?
- 8-7 電磁石で鉄球を保持する方式に改良
- 8-8 装置一体型ケースの製作
- 8-9 改良版 重力加速度測定機の使い方
リニアモーターカー模型の浮上実験
- 9-1 リニアモーターカー
- 9-2 浮上実験の仕組み
- 9-3 リニアモーターカーの作成
- 9-4 実験方法
索引
|
|
|
|