|
「動作原理」「機構」「組み立て方」がわかる!
|
剣崎 純 著
2013年10月15日発売
160ページ
定価 ¥2,530(本体 ¥2,300)
|
|
ISBN978-4-7775-1789-3 C3055 ¥2300E
|
 |
この本では、
・ 「2足歩行」・・・「すり足型」「足裏フォーク型」「重心移動型」「サーボ使用型」ほか
・ 「多足歩行」・・・「4足」「6足」「蛇行移動」
・ 「その他」・・・「踊る人形」「ロボット・ハンド」「自動電源Offロボット」
の「ロボット」工作の、「動作原理」「機構」「組み立て方」を、ていねいに解説しています。
*
本書の工作には、「ドライバ」「ニッパー」「ペンチ」など一般的な道具を使い、特別な工具は必要ありません。
また、制御の回路には、「マイコン」ではなく「ブレッドボード」を使い、
・「電子部品」 …一般的な「LSI」「トランジスタ」「抵抗」「コンデンサ」など
・「機械部品」 …ラジコン用の「サーボ」「モータ」「ギア」など
を取り付けて組み立てているため、内部の仕組みがよく理解できます。
|
|
| ■ 主な内容 ■ |
第0章 使う道具について
言葉は、「国」や「会社」ごとに異なる
道具
第1章 「すり足-2足歩行」ロボット
すり足歩行
すべり回転
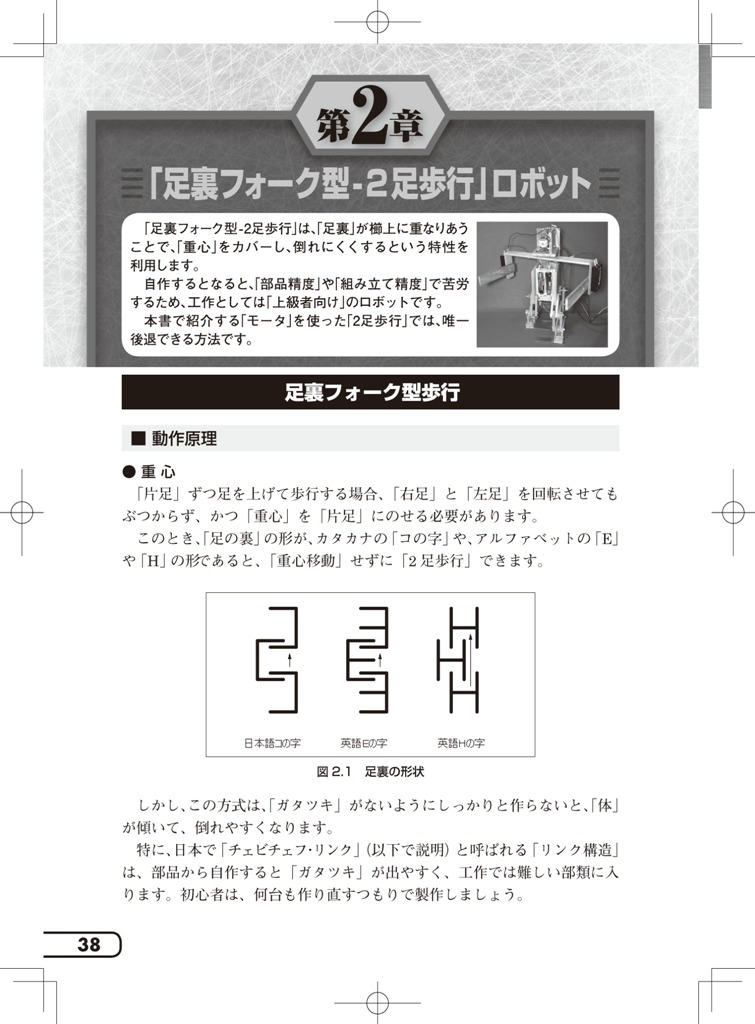
第2章 「足裏フォーク型-2足歩行」ロボット
足裏フォーク型歩行
すべり回転
第3章 「重心移動型-2足歩行」ロボット
<固定足首>重心移動型歩行
第4章 「4足歩行」ロボット
4足歩行
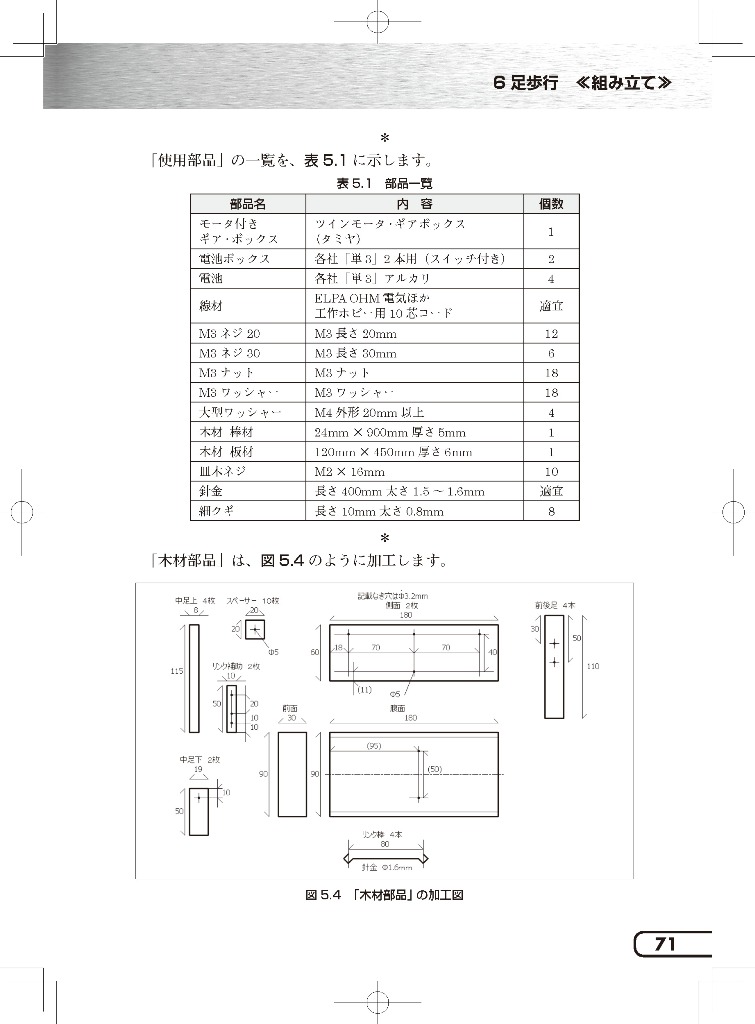
第5章 「6足歩行」ロボット
6足歩行
第6章 「蛇行移動」ロボット
蛇行移動
第7章 踊る人形
「モータスピード」コントローラ
第8章 ロボットハンド
「モータ回転位置」コントローラ
第9章 「自動電源off」ロボット
ラジコン用「サーボモータ」コントローラ
第10章 「サーボ」を使った「2足歩行」ロボット
「4軸4サーボ」の「2足歩行」
「4軸4サーボ」の「<自動>2足歩行」回路
第11章 「ホビーラジコン」を使ったロボット その①
「ホビー用ラジコン機器」を活用した「歩行」
攻撃腕
第12章 「ホビーラジコン」を使ったロボット その②
「ラジコンサーボ」による「<完全>2足歩行」
攻撃腕
第13章 プログラマブル・カー
ライントレース・カー
プログラマブル・カー
|
本書内容に関するご質問は、こちら
本書のサポートページはこちら.
|
|
|