|
「数値計算ソフト」の使い方と「制御理論」の実際

|
浪花 智英 著
2012年11月 9日発売
A5判
144ページ
定価 ¥2,530(本体 ¥2,300)
|
|
ISBN978-4-7775-1725-1 C3053 ¥2300E
|
 |
≪基礎からはじめて「ロボットアームの運動方程式」導出に挑戦!≫
数式処理ソフト「Maxima」は、マサチューセッツ工科大学で開発された歴史ある数式処理システムで、商用ソフトにひけをとらない処理能力をもちながら、フリーソフトとして公開され、注目を浴びています。
本書は、「古典制御」および「現代制御」の鍵となるさまざまな計算を、「Maxima」を用いて行なうとともに、計算結果をグラフで視覚化する手段をまとめたものです。
さらに、ロボット工学で重要な部分を占める、「ロボットアームの運動方程式」の導出を、この「数式処理ソフト」を用いて実現する方法を説明しています。
なお、それぞれの計算にまつわる理論的な説明は最小限にとどめ、「Maxima」の基礎的な使い方の学習を助けるとともに、例題の背景にある理論との関係が分かりやすくなるように心掛けています。
|
|
| ■ 主な内容 ■ |
|
まえがき
| 1.1 Maxima とは |
1.2 Maxima の機能の簡単な紹介 |
1.3 Maxima のインストール |
|
| 2.1 基本演算 |
2.2 ベクトル、行列演算 |
2.3 数値解析 |
2.4 数式処理 |
| 2.5 リスト |
2.6 関数 |
2.7 グラフ |
|
| 3.1 伝達関数によるモデル化 |
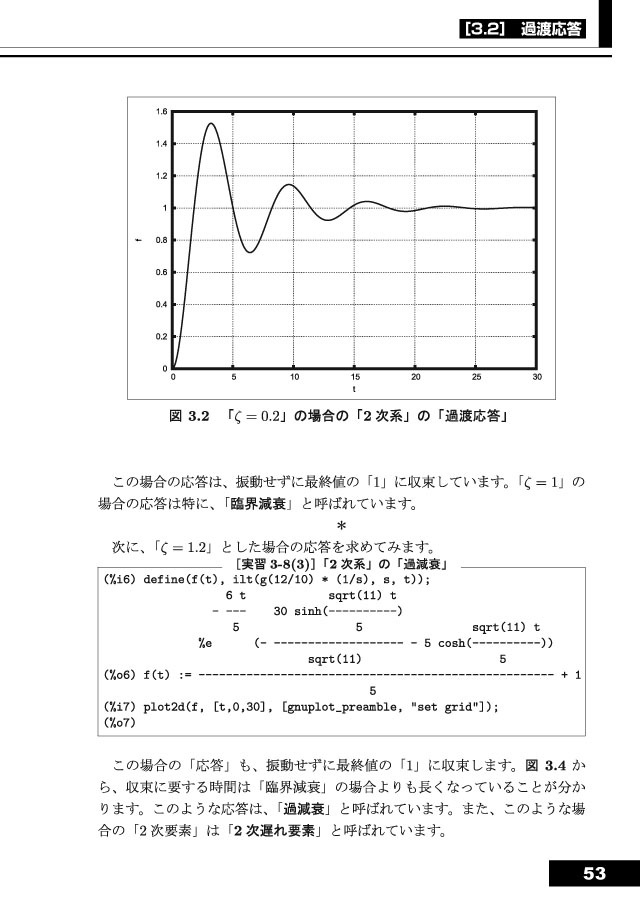
3.2 過渡応答 |
3.3 周波数応答 |
3.4 安定性の判別 |
| 3.5 根軌跡法 |
|
|
|
| 4.1 「状態変数」による制御系の表現 |
4.2 可制御性、可観測性 |
| 4.3 最小実現 |
4.4 伝達関数の計算 |
| 4.5 自由システムの解 |
4.6 等価変換 |
| 4.7 安定性判別 |
4.8 「状態フィードバック制御」の「極配置」 |
| 4.9 直接フィードバック制御 |
4.10 同一次元オブザーバの構成 |
| 4.11 同一次元オブザーバとフィードバック制御の併合系 |
4.12 最小次元オブザーバの構成 |
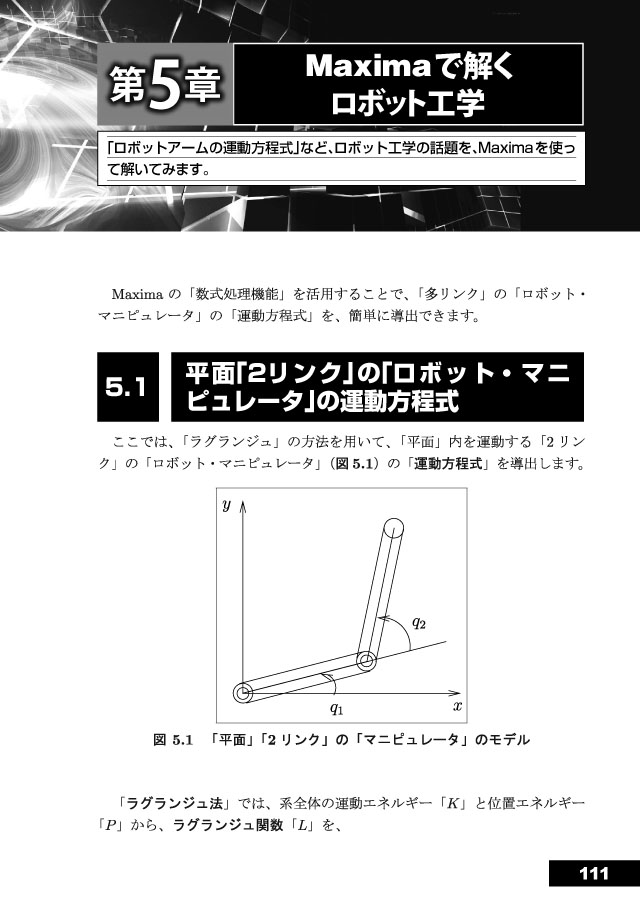
| 5.1 平面「2 リンク」の「ロボット・マニピュレータ」の運動方程式 |
5.2 「非線形力」からの「歪対称行列」の分離 |
| 5.3 「リグレッサ行列」の導出 |
5.4 「多リンク・マニピュレータ」への拡張 |
【付録】 「歪対称行列計算」の根拠
参考文献
索引
※ 内容が一部異なる場合があります。発売日は、東京の発売日であり、地域によっては1〜2日程度遅れることがあります。あらかじめご了承ください。
|
|
|
|