「Raspberry Pi」でつくる
電子工作
サポート情報
最終更新2013年08月05日
| 「Raspberry Pi」でつくる 電子工作 サポート情報 最終更新2013年08月05日 |
■ 本書サポート情報 (更新2013年08月05日)
■PDFのダウンロード
本書の「PDF版テキスト」は、以下からダウンロードできます。
PDFを開くためのパスワードは、本書に掲載しています。
■サンプル・プログラムのダウンロード
本書で解説しているサンプル・プログラムは、以下からダウンロードできます。
※サンプル・プログラムの使用にあたって生じたトラブルは、著者および工学社は一切の責任を負いません。また、サンプルなどは著作権法により保護されています。個人で利用する目的以外には利用できません。ネットワークへのアップロードなどは、著者の許可無く行なうことはできません。
■ お詫びと訂正 (更新2013年08月05日)
本文中における下記の部分が間違っておりました。お詫びして訂正いたします。| 誤 |
「/BIN」や「/SBIN」 |
| 正 |
「/bin」や「/sbin」 |
| 誤 |
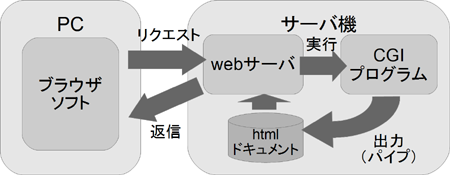
 「CGI」を使ったhtmlの生成と表示の流れ |
| 正 |
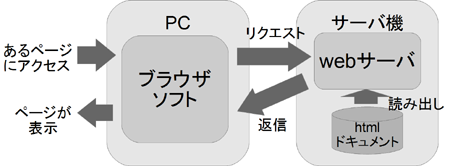
htmlドキュメントがブラウザに表示されるまで |
| 誤 |
 htmlドキュメントがブラウザに表示されるまで |
| 正 |
「CGI」を使ったhtmlの生成と表示の流れ |
| 誤 |
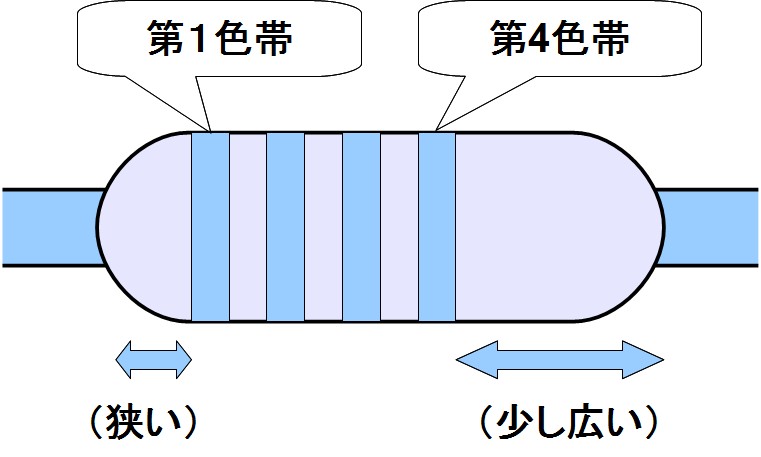
次ページの図は、「可変抵抗」の全体が |
| 正 |
前ページの図は、「可変抵抗」の全体が |
| 誤 |
付録でMicrochip社のADC |
| 正 |
PDF版テキストでMicrochip社のADC |
| 誤 |
I2C |
| 正 |
I²C |
| 誤 |
コマンドラインで「リダイレクト機能」を使い場合は、 |
| 正 |
コマンドラインで「リダイレクト機能」を使う場合は、 |
| 誤 |
LEDを点滅させたり、明るさを変化させるプログラムを応用して、モータの回転を制御してみましょう。 |
| 正 |
LEDを点滅させたり、明るさを変化させるプログラムを応用して、モータの回転を制御してみましょう。今回は、市販の「130モータ」を使います。 なお、「260モータ」程度までは、この回路で動作が可能です。 |
| 誤 |
「2N7000」ともっと大きい「MOS-FET」の例、高輝度白色LED(Vf=3.1V)用回路 |
| 正 |
「2N7000」で高輝度白色LED(Vf=3.1V)をドライブする回路 |
| 誤 |
#!/usr/bin/python import spidev import time spi_ch = 1 conn = spidev.SpiDev(0,spi_ch) conn.max_speed_hz = 1000000 # 1MHz dummy = conn.xfer2( [(0x16*2)+0x80 ,0b00001001] ) print dummy for i in range(200): x0 = conn.xfer2( [0x06*2 ,0] ) y0 = conn.xfer2( [0x07*2 ,0] ) z0 = conn.xfer2( [0x08*2 ,0] ) x1 = ((x0[1] + 128) % 256) - 128 y1 = ((y0[1] + 128) % 256) - 128 z1 = ((z0[1] + 128) % 256) - 128 print "x=%s : y=%s : z=%s" % (x1 ,y1 ,z1) time.sleep(0.1) |
| 正 |
#!/usr/bin/python import spidev import time spi_ch = 1 conn = spidev.SpiDev(0,spi_ch) conn.max_speed_hz = 1000000 # 1MHz dummy = conn.xfer2( [(0x16*2)+0x80 ,0b00001001] ) print dummy for i in range(200): x0 = conn.xfer2( [0x06*2 ,0] ) y0 = conn.xfer2( [0x07*2 ,0] ) z0 = conn.xfer2( [0x08*2 ,0] ) x1 = ((x0[1] + 128) % 256) - 128 y1 = ((y0[1] + 128) % 256) - 128 z1 = ((z0[1] + 128) % 256) - 128 print "x=%s : y=%s : z=%s" % (x1 ,y1 ,z1) time.sleep(0.1) |
| 誤 |
#!/usr/bin/python import smbus import time i2c = smbus.SMBus(1) # SMBus(0) if rev1.0 dev_ad = 0x63 reg0 = 0x0 # control reg reg1 = 0x1 # fault reg def motor_move(in1,in2): for i in [0x06 ,0x0f ,0x19 ,0x1f ,0x25 ,0x29]: out_data = i*4 + in2*2 + in1 # output voltage and direction i2c.write_byte_data(dev_ad ,reg0 ,out_data) # input status in_data = i2c.read_byte_data(dev_ad ,reg1) print ("level = %x status : %x" % (i,in_data)) time.sleep(4) # stop motor i2c.write_byte_data(dev_ad ,reg0 ,0) print ("stop") time.sleep(2) # main i2c.write_byte_data(dev_ad ,reg1 ,0x80) # reset motor_move(1,0) # forward motor_move(0,1) # backward |
| 正 |
#!/usr/bin/python import smbus import time i2c = smbus.SMBus(1) # SMBus(0) if rev1.0 dev_ad = 0x63 reg0 = 0x0 # control reg reg1 = 0x1 # fault reg def motor_move(in1,in2): for i in [0x06 ,0x0f ,0x19 ,0x1f ,0x25 ,0x29]: out_data = i*4 + in2*2 + in1 # output voltage and direction i2c.write_byte_data(dev_ad ,reg0 ,out_data) # input status in_data = i2c.read_byte_data(dev_ad ,reg1) print ("level = %x status : %x" % (i,in_data)) time.sleep(4) # stop motor i2c.write_byte_data(dev_ad ,reg0 ,0) print ("stop") time.sleep(2) # main i2c.write_byte_data(dev_ad ,reg1 ,0x80) # reset motor_move(1,0) # forward motor_move(0,1) # backward |
| 誤 |
webio.js |
| 正 |
webiopi.js |
| 誤 |
http://192.168.11.100:8000/ |
| 正 |
http:// 192.168.3.99:8000/ (読者ごとの環境に合わせて変更) |
| 誤 |
メインになる③の作り方を中心に、 |
| 正 |
メインになる①の作り方を中心に |
| 誤 |
②htmlおよびJavaScript |
| 正 |
②htmlおよび③JavaScript |
| 誤 |
詳しくは付録を参照 |
| 正 |
詳しくはPDF版テキストを参照 |
| 誤 |
 |
| 正 |
 |
| 誤 |
|
| 正 |
|
(株)工学社 I/O編集部
本書の内容に関するご質問/お問い合わせは、次の方法で工学社編集部宛にお願いします。
なお、電話によるお問い合わせはご遠慮ください。
※ご質問/お問い合わせの際、お客様の使用・動作環境などに添えて、具体的な症状をできるだけ詳しくお知らせください。
※FAXでのご質問/お問い合わせの場合は、必ずお客様のFAX番号を明記してください。